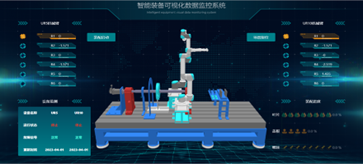
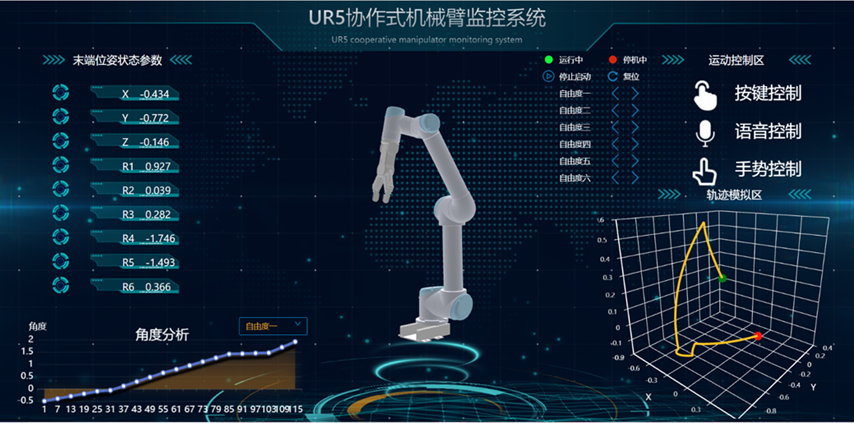
创新性的提出了双机械臂多模态感知协同控制方法,实现了手势、人体、语音和视觉等的多模态融合。搭建了基于数字孪生的双机械臂协同装配系统,攻克了复杂工业装配场景下的双机械臂协同控制技术,实现了工业设备的精准模拟和智能管控
提出了非对称间隙叶片动力学理论模型和无转速同步传感器下的叶尖定时测振改进方法,开发了旋转叶片振动非接触在线监测系统,实现了振动参数实时分析,有效降低测振操作复杂性,提高振动参数辨识准确度
提出了基于动力学仿真的汽轮机叶片转子系统故障样本生成方法,实现了多种工况下汽轮机叶片转子系统故障类型的准确识别和分类,提高了汽轮机故障诊断的快速性与准确性